
Isometric view of vehicle.
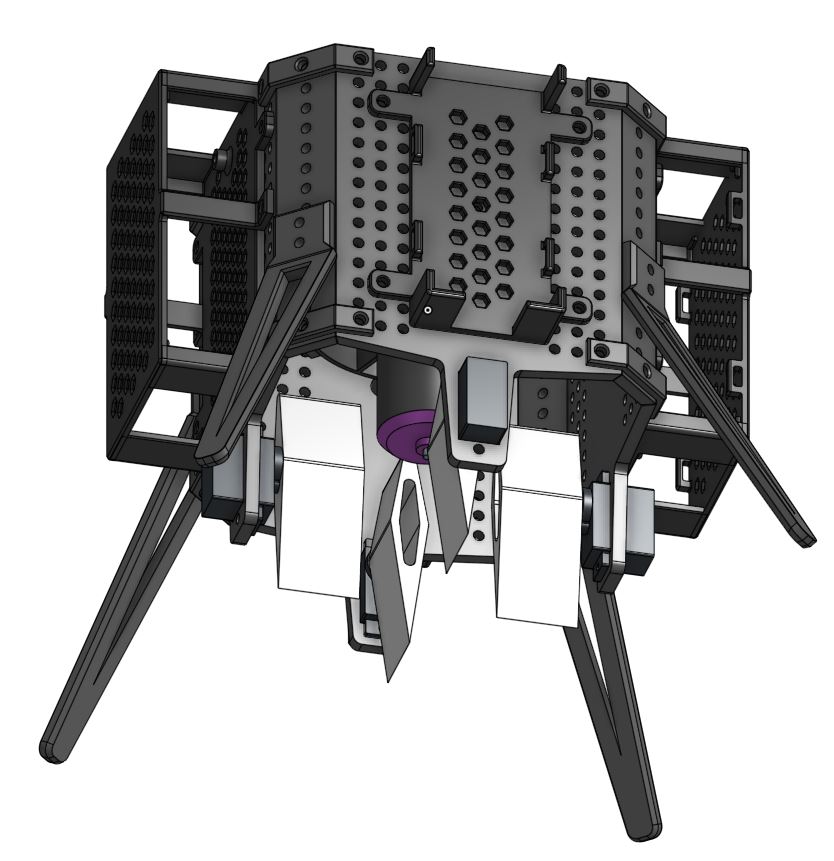
Isometric view of TVC vanes.
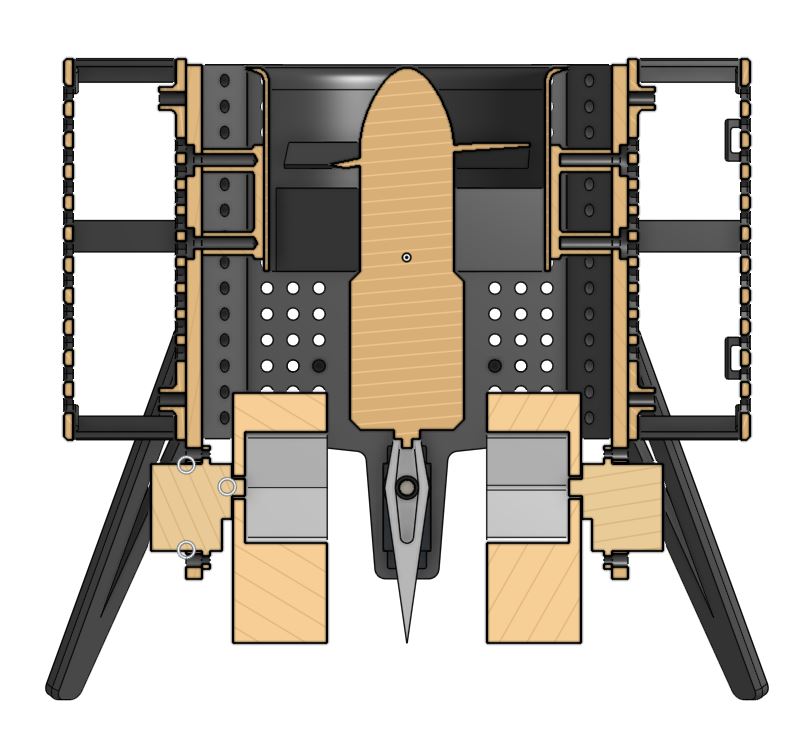
Section view.
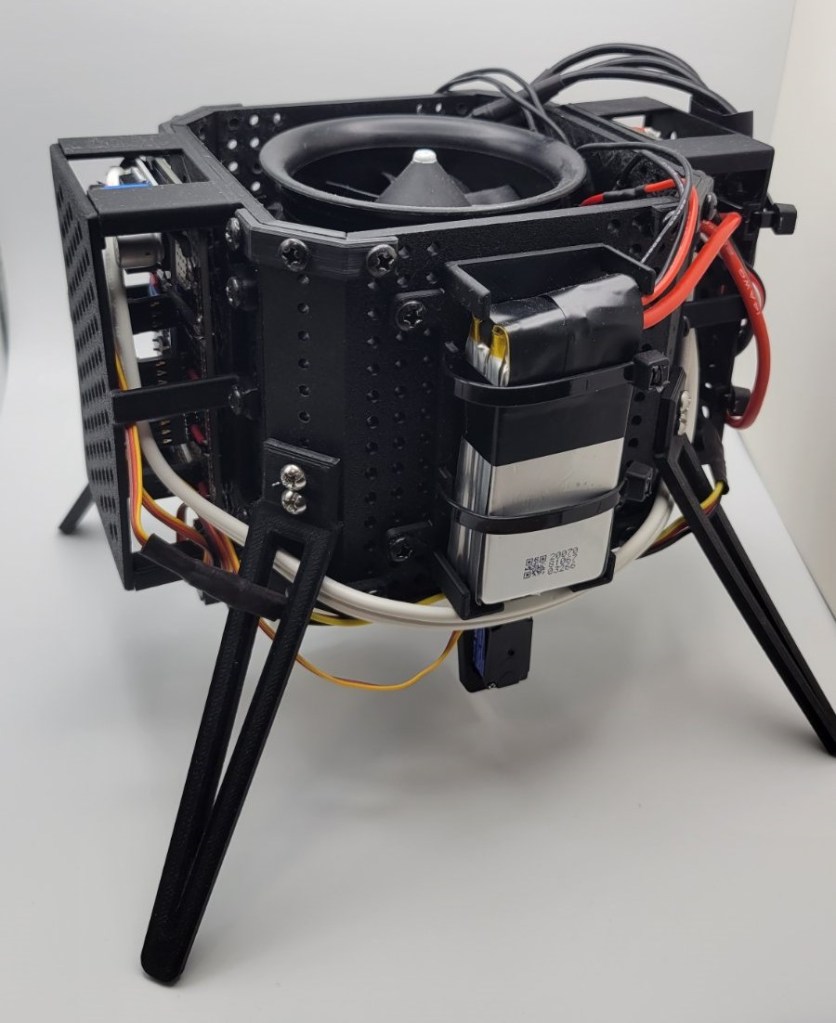
Isometric view of assembled vehicle.
Testing of the electric ducted fan (EDF) and thrust vector control (TVC) guide vanes showed nominal operation of all systems.
About HB
Humming bird is a personal engineering project aimed at designing, building, and testing a self-stabilizing electric rocket. This project not only serves as an exercise in CAD and hands on building but also in programming of Thrust Vector Control (TVC) systems.
I started this project in December of 2022 and it is now in it’s final stages. This page is updated with progress in getting this exciting project to fly.
Project Objectives
Educational Focus: One of the primary objectives of Humming Bird is to facilitate an in-depth understanding of core engineering concepts through practical experience.
Flight Profile: The desired operation of Humming Bird would be a ~30 second duration flight which will include launch, horizontal flight, and a safe landing.
Technical Aspects
Propulsion System: The propulsion system for this vehicle consists of an Electric Ducted Fan(EDF) which produces a total thrust of 14.22 Newtons.
TVC: The thrust vector control system consists of four guide vanes which give the vehicle control authority on all 3 axis.
Avionics: The main brain of the computer is a Arduino-based board called the Teensy 4.1. Along with the Teensy the vehicle is equipped with a gyro sensor which allows the vehicle to know its position and orientation.
Funding
I was able to secure funding for this project through the College of Engineering Experiential Learning Grant. This not only made this project possible but gave me valuable experience in securing funding.
Next Steps
As stated before this project is not finished, however, it is is in it’s final stages. The things that still need to be done on the vehicle include: programming of PID controllers for in-flight stabilization and tuning of the controller parameters to ensure nominal operation. I am currently working on the code after which I will begin testing and tuning the controllers.
